
HARVARD MICROROBOTICS LAB DEVELOPS FIRST INSECT-SIZE ROBOT CAPABLE OF FLYING AND SWIMMING In 1939, a Russian engineer proposed a “flying submarine” — a vehicle that can seamlessly tran... Read more
{kind=link}

The quarter-sized RoboBee looks like a fly, but it was designed to save us from colony collapse disorder. If the bees die, we have a robot backup. We take for granted the effortless flight o... Read more
 Spy On You){kind=link}
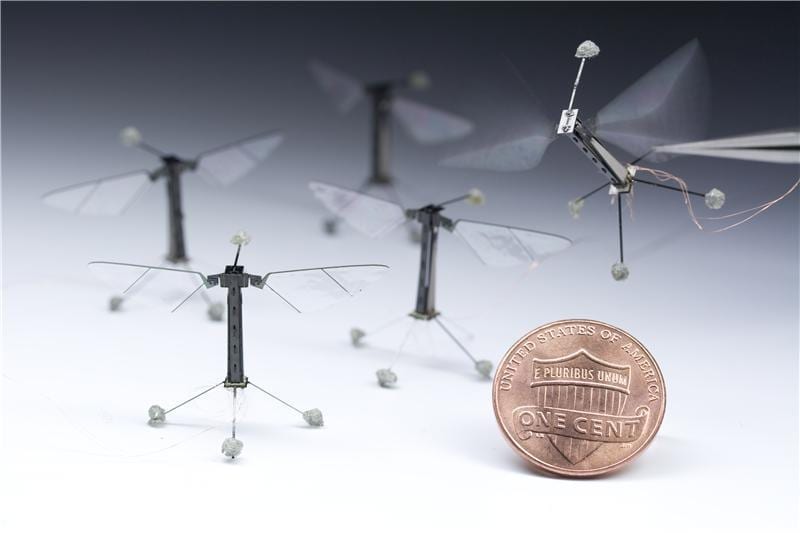
In culmination of a decade’s work, RoboBees achieve vertical takeoff, hovering, and steering Last summer, in a Harvard robotics laboratory, an insect took flight. Half the size of a paper cl... Read more
{kind=link}

Harvard has been working on a robotic bee for five years now. Five years is a long time in the fast-paced world of robotics, but when you’re trying to design a controllable flying robo... Read more
{kind=link}