Today’s Discoveries
About Us
Dark
Light
Follow
Today’s Discoveries
About Us
Dark
Light
Follow
Subscribe
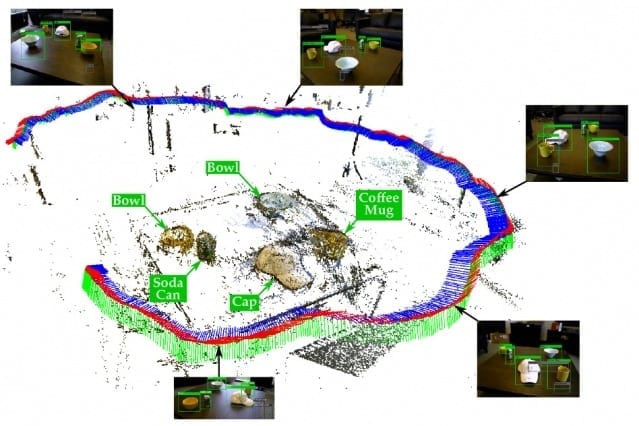
Object recognition for robots
Object recognition for robots
Scroll To Top
Today’s Discoveries
About Us
ABOUT ISSUE
SUBSCRIPTION SERVICES
NEWSLETTER SIGN UP
AUTHORS
CONTACT
Dark
Light